1. Введение
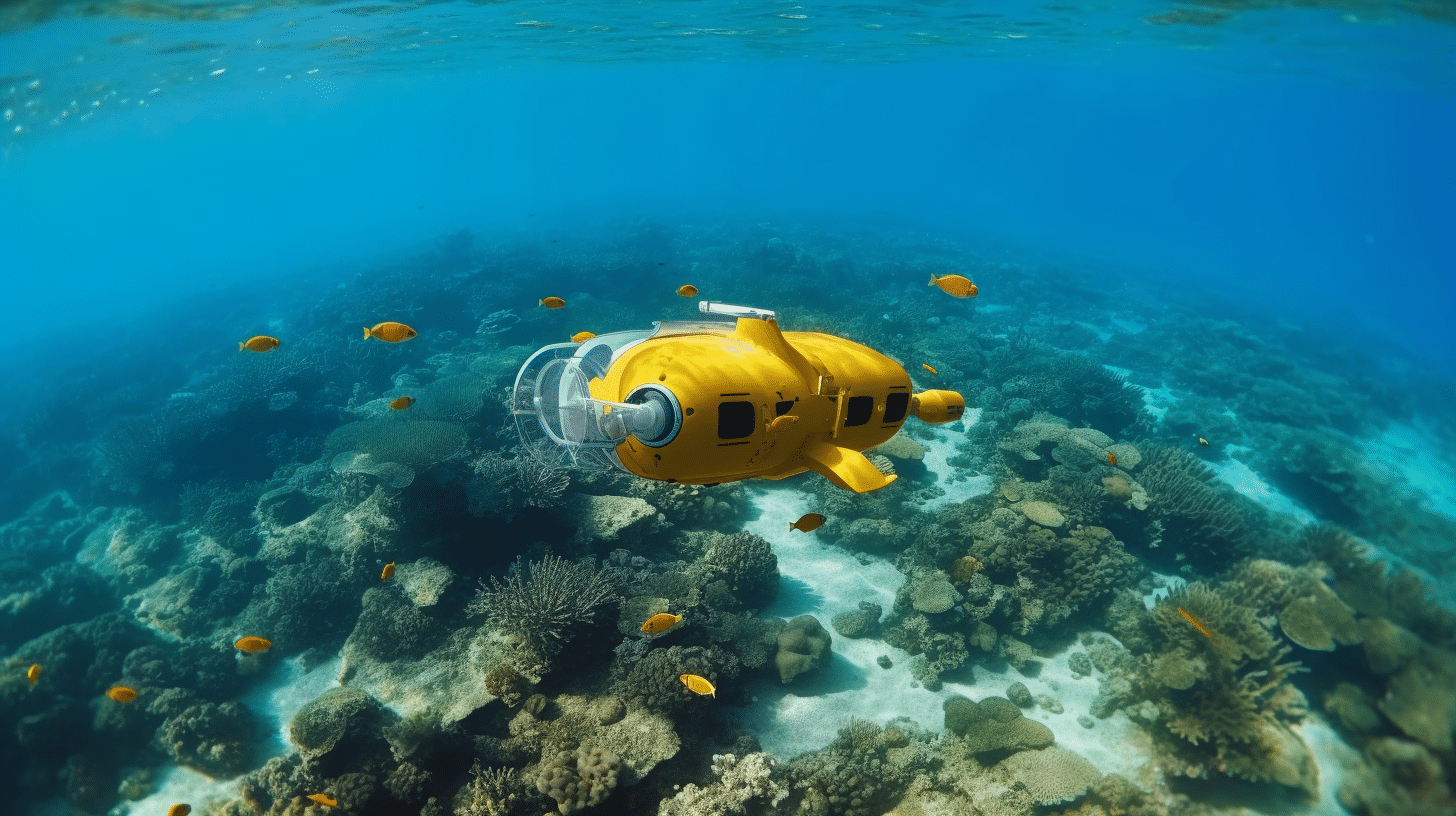
1.1. Подводные дроны: исследование глубин
Подводные дроны, также известные как подводные аппараты с дистанционным управлением (ROV) или автономные подводные аппараты (AUV), меняют способы исследования и взаимодействия с миром под поверхностью океана. Эти сложные машины используются в различных отраслях промышленности: от мониторинга окружающей среды и научных исследований до разведки нефти и газа и морской безопасности. В основе каждого подводного дрона лежит печатная плата (PCBA), которая служит центром управления, соединяя и взаимодействуя со всеми компонентами. Эта статья погружается в мир печатных плат для подводных дронов, рассматривая уникальные проблемы, ключевые компоненты и конструктивные соображения, необходимые для создания надежных и эффективных погружных систем.
2. Мир подводных дронов
2.1. Приложения и отрасли
Подводные дроны произвели революцию в различных отраслях промышленности благодаря своим универсальным возможностям. Некоторые ключевые приложения и отрасли включают в себя:
- Экологический мониторинг и охрана: Эти дроны помогают ученым изучать морские экосистемы, отслеживать виды, находящиеся под угрозой исчезновения, и контролировать качество воды, что позволяет улучшить стратегии сохранения и выработки политики.
- Научное исследование: Подводные дроны способствуют нашему пониманию океанографии, морской биологии и геологии, собирая важные данные из неизведанных глубин.
- Разведка нефти и газа: ROV и AUV являются бесценными инструментами для проверки и обслуживания морских буровых установок, трубопроводов и подводных сооружений, обеспечивая бесперебойную работу и снижая риск аварий.
- Морская безопасность и оборона: Подводные дроны используются в поисково-спасательных операциях, обнаружении мин и наблюдении, повышая безопасность как военных, так и гражданских морских операций.
- Археология и культурное наследие: Эти дроны облегчают обнаружение и документирование объектов подводного культурного наследия, включая затонувшие корабли и затопленные руины, сохраняя нашу историю для будущих поколений.
- Рекреационная и подводная фотография: Компактные подводные дроны стали популярными инструментами для энтузиастов, которые хотят исследовать подводный мир и снимать потрясающие изображения и видео.
2.2. Типы подводных дронов
Существует два основных типа подводных дронов: дистанционно управляемые аппараты (ROV) и автономные подводные аппараты (AUV).
- ROV привязаны к наземной станции управления, которая обеспечивает питание и связь. Этот трос позволяет осуществлять управление и передачу данных в режиме реального времени, что делает ROV подходящими для задач, требующих вмешательства и контроля человека, таких как проверки и техническое обслуживание.
- АНПА работать независимо, без привязки. Они полагаются на заранее запрограммированные миссии и бортовой аккумулятор, что позволяет им преодолевать огромные расстояния и достигать областей, которые могут быть недоступны для ROV. AUV идеально подходят для крупномасштабных задач съемки, картографии и мониторинга.
Каждый тип подводного дрона имеет свои уникальные требования и проблемы, связанные с печатными платами, которые необходимо тщательно учитывать в процессе проектирования и производства.
3. Ключевые компоненты печатных плат подводных дронов (расширенное)
3.1. Гидроизоляция и устойчивость к давлению
Гидроизоляция является жизненно важным аспектом конструкции печатной платы подводного дрона. Для обеспечения защиты электроники рекомендуется использовать многоуровневый подход. Во-первых, рассмотрите возможность использования защитного покрытия на самой печатной плате для защиты компонентов от влаги и коррозии. Далее выберите специализированные корпуса с прокладками и уплотнениями, предотвращающими попадание воды даже под высоким давлением. Наконец, заливочные компаунды можно использовать для защиты чувствительных электронных компонентов, обеспечивая дополнительную защиту от воды, давления и вибрации.
3.2. Управление энергопотреблением
Управление питанием подводных дронов имеет решающее значение из-за ограниченности энергетических ресурсов, особенно для АНПА. При разработке печатных плат для этих дронов рассмотрите возможность использования компонентов с низким энергопотреблением, таких как микроконтроллеры и датчики, которые потребляют минимальное количество энергии. Кроме того, используйте энергоэффективные стабилизаторы напряжения и источники питания, способные удовлетворить различные потребности системы в мощности. Внедрение спящих режимов или функций энергосбережения для второстепенных систем, когда они не используются, может дополнительно оптимизировать энергопотребление и продлить продолжительность миссии.
3.3. Системы навигации и связи
Навигационные системы для подводных дронов обычно включают в себя комбинацию гидролокатора, инерциальных навигационных систем (ИНС) и датчиков глубины. Гидролокационные системы используют акустические волны для обнаружения объектов, составления карты окрестностей и определения местоположения дрона. INS использует акселерометры и гироскопы для отслеживания положения и ориентации дрона с течением времени. Датчики глубины измеряют давление воды, чтобы оценить глубину дрона. Крайне важно разработать печатные платы с достаточной вычислительной мощностью и соответствующими интерфейсами для обработки данных, генерируемых этими навигационными системами.
Связь в подводной среде представляет собой уникальные проблемы из-за ограничений традиционных беспроводных технологий. Системы акустической связи часто используются для передачи данных под водой, поскольку звуковые волны распространяются в воде лучше, чем электромагнитные волны. При разработке печатных плат для подводных дронов убедитесь, что они совместимы с этими специализированными системами связи и обеспечивают надежную и устойчивую к ошибкам передачу данных.
3.4. Интеграция датчиков
Включение различных датчиков в подводные дроны требует тщательного рассмотрения конструкции печатной платы. Датчики температуры, давления и качества воды могут быть интегрированы для мониторинга условий окружающей среды. Оптические датчики и датчики изображения, такие как камеры и системы LiDAR, могут захватывать изображения и видео для проверки, картографирования или исследовательских целей. При проектировании печатной платы убедитесь, что она имеет необходимые интерфейсы, вычислительную мощность и возможности хранения данных для эффективной обработки данных, генерируемых этими датчиками. Внедрение алгоритмов объединения датчиков также может помочь оптимизировать использование нескольких датчиков и улучшить общую производительность системы.
3.5. Контроллеры двигателей и приводы
Двигательные и рулевые системы подводных дронов основаны на электродвигателях и приводах. Разработка печатных плат с усовершенствованными контроллерами двигателей имеет решающее значение для обеспечения бесперебойной и точной работы этих систем. Контроллеры двигателей должны быть способны управлять потребляемой мощностью, скоростью и крутящим моментом двигателей, обеспечивая при этом обратную связь и управление в реальном времени. Рассмотрите возможность использования бесщеточных двигателей постоянного тока, поскольку они обеспечивают более высокую эффективность, более длительный срок службы и меньшие затраты на техническое обслуживание по сравнению с коллекторными двигателями. При проектировании печатной платы убедитесь, что контроллеры двигателей совместимы с выбранными двигателями и могут обеспечить требуемые уровни мощности и производительности.
3.6. Бортовые вычисления и хранение данных
Возможности бортовых вычислений и хранения данных необходимы для подводных дронов, поскольку они позволяют дрону обрабатывать данные, выполнять алгоритмы управления и хранить информацию о миссии. Высокопроизводительные процессоры, такие как микроконтроллеры или системы на кристалле (SoC), должны использоваться для обработки вычислительных потребностей навигации, связи и обработки данных датчиков. Включите решения для памяти и хранения данных
4. Проблемы проектирования печатных плат для подводных дронов
Разработка печатных плат для подводных дронов представляет собой уникальную задачу из-за сложных условий эксплуатации и особых требований. Вот некоторые из наиболее серьезных проблем и ценные советы по их преодолению:
4.1. Обеспечение гидроизоляции и коррозионной стойкости
- Выбирайте материалы с высокой коррозионной стойкостью, например золотое или никелирование, для защиты печатной платы и соединений компонентов.
- Используйте конформные покрытия, такие как акрил, силикон или уретан, чтобы защитить печатную плату от влаги и коррозии.
- Используйте герметичные корпуса и разъемы для предотвращения попадания воды под давлением.
- Используйте заливочные составы для герметизации и защиты чувствительных компонентов от воды, давления и вибрации.
4.2. Проектирование с учетом устойчивости к давлению
- Выбирайте компоненты, рассчитанные на предполагаемую глубину и диапазон давления подводного дрона.
- Выбирайте компоненты повышенной прочности, способные выдерживать механические нагрузки, вызванные средой с высоким давлением.
- Используйте инструменты 3D-моделирования и моделирования для оценки воздействия давления на печатную плату и ее компоненты.
4.3. Оптимизация управления питанием
- Используйте компоненты с низким энергопотреблением, чтобы снизить общее энергопотребление.
- Включите спящие режимы или функции энергосбережения для второстепенных систем.
- Создавайте печатные платы с эффективными стабилизаторами напряжения и источниками питания, способными справляться с изменяющимися требованиями к мощности.
4.4. Обеспечение акустической связи и целостности сигнала
- Выбирайте высококачественные акустические модемы и преобразователи, чтобы обеспечить надежную подводную связь.
- Разработайте компоновку печатной платы так, чтобы минимизировать электромагнитные помехи (EMI) и обеспечить целостность сигнала.
- Используйте методы экранирования, заземления и фильтрации для уменьшения шума и улучшения качества сигнала.
4.5. Интеграция навигационных и сенсорных систем
- Спроектируйте печатную плату с соответствующими интерфейсами и вычислительной мощностью для размещения гидролокатора, INS и датчиков глубины.
- Внедрите алгоритмы объединения датчиков, чтобы оптимизировать использование нескольких датчиков и улучшить общую производительность системы.
- Рассмотрите возможность использования отказоустойчивых или резервных конфигураций датчиков для повышения надежности системы.
4.6. Обеспечение терморегулирования
- Используйте инструменты теплового моделирования для анализа выделения и рассеивания тепла внутри печатной платы.
- Используйте радиаторы, тепловые отверстия или другие методы рассеивания тепла для обеспечения эффективного охлаждения.
- Выбирайте компоненты с широким температурным диапазоном, чтобы выдерживать колебания температуры подводной среды.
4.7. Учет ограничений по размеру и весу
- Используйте компактные компоненты и многослойные печатные платы, чтобы минимизировать общий размер и вес печатной платы.
- Оптимизируйте размещение и маршрутизацию компонентов, чтобы максимально эффективно использовать пространство.
- Рассмотрите возможность использования гибких печатных плат, чтобы они соответствовали форме подводного дрона и ограниченному пространству.
4.8. Управление разъемами и кабелями
- Выбирайте разъемы с высокой коррозионной стойкостью, например позолоченные разъемы или разъемы из нержавеющей стали, чтобы обеспечить долгосрочную надежность.
- Выбирайте разъемы и кабели, рассчитанные на подводную эксплуатацию, которые могут выдерживать суровые условия окружающей среды.
- Используйте методы снятия натяжения, чтобы предотвратить механическое воздействие на разъемы и кабели, обеспечивая их долговечность и долговечность.
4.9. Проектирование с учетом модульности и удобства обслуживания
- Внедрите модульный подход к проектированию, позволяющий легко заменять, модернизировать или расширять печатную плату и ее компоненты.
- Убедитесь, что разъемы, компоненты и контрольные точки доступны для целей обслуживания и устранения неполадок.
- Используйте понятную маркировку и документацию, чтобы облегчить эффективные процессы обслуживания и ремонта.
4.10. Обеспечение соответствия отраслевым стандартам
- Ознакомьтесь с соответствующими отраслевыми стандартами и правилами, такими как стандарты ISO, ROV и AUV, чтобы обеспечить безопасность, надежность и совместимость подводного дрона.
- Спроектируйте и изготовьте печатную плату в соответствии с этими стандартами, чтобы минимизировать потенциальные риски и облегчить получение одобрения регулирующих органов.
- Проведите тщательное тестирование и проверку для проверки соответствия применимым стандартам и требованиям.
Приняв во внимание эти дополнительные проблемы и рекомендации, вы сможете еще больше улучшить конструкцию и производительность печатной платы вашего подводного дрона, что приведет к созданию более надежной, эффективной и функциональной системы подводных дронов.
Проблемы проектирования печатной платы для подводных дронов
5.1. Используйте инструменты автоматизированного проектирования (САПР)
- Используйте лучшие инструменты САПР, такие как Altium Designer, Autodesk EAGLE или KiCad, для проектирования и моделирования вашей печатной платы.
- Рассмотрите возможность использования специализированных инструментов, таких как ANSYS для термического, механического анализа и анализа жидкостей или CST Studio Suite для электромагнитного моделирования.
5.2. Выбирайте высококачественные компоненты
- При выборе компонентов обратите внимание на бренды с хорошей репутацией в области качества и надежности, такие как Texas Instruments, Analog Devices или TE Connectivity.
- Для подводных применений используйте корпуса, разъемы и датчики со степенью защиты IP, предназначенные для работы в суровых условиях.
5.3. Проведите обширное тестирование и проверку
- Выполните такие тесты, как внутрисхемное тестирование (ICT), автоматический оптический контроль (AOI) и рентгеновский контроль, чтобы проверить целостность вашей печатной платы.
- Для проведения испытаний на воздействие окружающей среды рассмотрите возможность подвергнутия вашей печатной платы циклическому изменению температуры, испытанию на влажность и солевому туману.
- Используйте барокамеры для имитации подводной среды и проверки производительности вашей печатной платы под давлением.
5.4. Сотрудничайте с опытными партнерами
- Сотрудничайте со специализированными производителями печатных плат, такими как Rowsum, которые имеют опыт проектирования и производства печатных плат для подводных дронов.
- Используйте опыт отраслевых ассоциаций, таких как Международная ассоциация беспилотных транспортных систем (AUVSI), чтобы получить ценную информацию и пообщаться с профессионалами в этой области.
5.5. Внедрить надежную систему управления качеством (QMS)
- Примите международно признанные стандарты управления качеством, такие как ISO 9001, чтобы обеспечить согласованность и постоянное совершенствование процессов проектирования и производства печатных плат.
- Используйте такие инструменты, как «Шесть сигм» или «Бережливое производство», чтобы выявить и устранить источники нестабильности и потерь в ваших процессах.
5.6. Инвестируйте в текущие исследования и разработки (НИОКР)
- Будьте в курсе последних достижений в области технологий подводных дронов, посещая отраслевые конференции, семинары и вебинары.
- Сотрудничайте с исследовательскими институтами и университетами, работающими над передовыми исследовательскими проектами подводных дронов.
5.7. Получите обратную связь от конечных пользователей
- Проводите сеансы пользовательского тестирования и фокус-группы с потенциальными конечными пользователями, чтобы получить прямые отзывы о конструкции и производительности печатной платы вашего подводного дрона.
- Внедряйте опросы пользователей или формы обратной связи для сбора структурированных данных об удовлетворенности пользователей и областях, требующих улучшения.
- Установите каналы для постоянного общения с конечными пользователями, такие как форумы, социальные сети или специальные каналы поддержки, чтобы обеспечить постоянную обратную связь и улучшение.
Включив эти подробные советы и рекомендации в процесс проектирования PCBA вашего подводного дрона, вы сможете создать более надежную, эффективную и высокопроизводительную систему, которая будет отвечать потребностям вашего целевого рынка и выделять ваш продукт среди конкурентов.
Заключение
Навигация в мире проектирования печатных плат для подводных дронов может оказаться сложной и сложной задачей. Понимая ключевые компоненты, проблемы и возможности в этой области, вы можете оптимизировать свои электронные проекты для достижения успеха. Использование передовых инструментов САПР, выбор высококачественных компонентов, проведение обширных испытаний и сотрудничество с опытными партнерами, такими как Rowsum, могут помочь гарантировать, что печатная плата вашего подводного дрона надежна, эффективна и готова к работе в сложных подводных условиях. Отправляясь в путешествие по подводному дрону, не забывайте оставаться в курсе, получать отзывы от конечных пользователей и постоянно инвестировать в исследования и разработки, чтобы оставаться на шаг впереди и предоставлять своим клиентам наилучшие продукты.
Часто задаваемые вопросы
1. Каковы ключевые компоненты печатной платы подводного дрона?
Ключевые компоненты включают центральный процессор (ЦП), память, систему управления питанием, датчики, модули связи и контроллеры двигателей. Эти компоненты работают вместе, чтобы контролировать движения подводного дрона, следить за его окружением и общаться с пользователем.
2. Каковы некоторые общие проблемы при проектировании печатных плат для подводных дронов?
Некоторые общие проблемы включают в себя работу в суровых подводных условиях, обеспечение водонепроницаемости, оптимизацию энергопотребления, управление рассеиванием тепла и обеспечение надежной связи с поверхностью.
3. Каковы некоторые стратегии оптимизации конструкции печатной платы подводного дрона для достижения успеха?
Стратегии включают использование передовых инструментов САПР, выбор высококачественных компонентов, проведение обширного тестирования и проверки, сотрудничество с опытными партнерами, внедрение надежной системы управления качеством, инвестиции в текущие исследования и разработки и получение отзывов от конечных пользователей.
4. Как Rowsum может помочь с разработкой PCBA для подводных дронов?
Rowsum — производитель печатных плат и печатных плат, обладающий опытом в разработке печатных плат для подводных дронов. Они предлагают высококачественную продукцию для печатных плат, исключительное обслуживание клиентов, а также ценную информацию и рекомендации для клиентов, работающих над проектами подводных дронов.
5. Какие инструменты САПР рекомендуются для проектирования печатных плат подводных дронов?
Некоторые популярные инструменты САПР для проектирования и моделирования печатных плат включают Altium Designer, Autodesk EAGLE и KiCad. Эти инструменты помогут вам визуализировать макет, обнаружить потенциальные проблемы и внести необходимые коррективы перед изготовлением.